
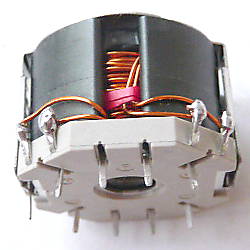
 Often coils have to be custom made for your application. I started making my first coil by simply taking a bobbin and wire and winding the coil by hand (see left). This can be a very boring job. So it was time for a simple winder that is cheap and easy to build. I didn’t want to wind by hand and count the windings in my head any more. So the winder had to have a motor, a rotary encoder and an arduino to do the counting job. Continue reading
Often coils have to be custom made for your application. I started making my first coil by simply taking a bobbin and wire and winding the coil by hand (see left). This can be a very boring job. So it was time for a simple winder that is cheap and easy to build. I didn’t want to wind by hand and count the windings in my head any more. So the winder had to have a motor, a rotary encoder and an arduino to do the counting job. Continue reading
Make your own winding machine
2 Replies
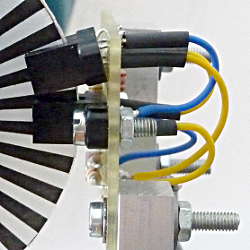 In this post we will add a second photointerrupter to our rotary encoder. This will give you information about the direction your rotary device turns. So you will be able to count forward and backword depending on the turning direction. This is necessary e. g. for many positioning application. The encoder we will make is also called a quadrature encoder.
In this post we will add a second photointerrupter to our rotary encoder. This will give you information about the direction your rotary device turns. So you will be able to count forward and backword depending on the turning direction. This is necessary e. g. for many positioning application. The encoder we will make is also called a quadrature encoder.