
Now that our rotary encoder or quadrature encoder hardware is up and running it’s time to tell our arduino what to do with the signals. We want it to count the pulses of the simple encoder. The quadrature encoder counting up and down depending on the turning direction is what we also want. Continue reading
rotary encoder software for arduino
5 Replies
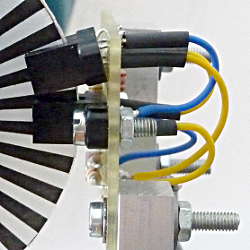 In this post we will add a second photointerrupter to our rotary encoder. This will give you information about the direction your rotary device turns. So you will be able to count forward and backword depending on the turning direction. This is necessary e. g. for many positioning application. The encoder we will make is also called a quadrature encoder.
In this post we will add a second photointerrupter to our rotary encoder. This will give you information about the direction your rotary device turns. So you will be able to count forward and backword depending on the turning direction. This is necessary e. g. for many positioning application. The encoder we will make is also called a quadrature encoder.